.png)
.jpg)
2024-09-23 自动驾驶应用增长及现况
近期国内在无人物流车无人驾驶公交车陆续上路之后,汽车智能驾驶应用正迎来飞速的发展,根据智能网联汽车产业联盟发布<智能网联汽车技术路线2.0>报告,国内将逐步推进汽车联网化以及智能化的发展,预计到2035年将实现大规模自动驾驶的应用,被视为新一轮产业革命的战略。
以目前现况来说,自动驾驶车辆仍应用于一些限定场景,低速场景以及环境复杂度低的场景,例如智慧矿山,港口码头物流园区等领域,在国际汽车工程师学会(SAE)将汽车驾驶自动化分级规定L0~L5,L2到L3是自动驾驶等级的分水岭,在摄像头以及传感器配套数量上升,最终达到完全自动驾驶的阶段。
而汽车要实现自动驾驶的产业链,包括了上游的感知层,传输层,决策层以及执行层,中游的平台层和汽车制造业,以及下游的应用场景。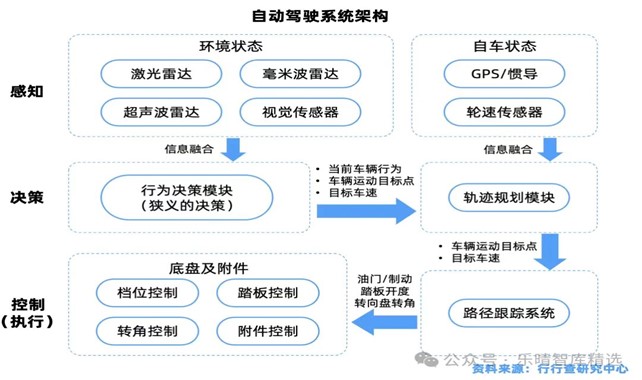
以技术面来说,要实现自动驾驶系统,首先要解决的就是感知层信息采集的过程,感知层处于和外界信息交互的关键环节,又主要分为环境感知以及车身感知,环境感知所需传感器感知周围物体以及实现无人驾驶汽车定位的传感器,包括摄像头模块,超声波雷达,毫米波雷达,激光雷达以及红外夜视技术等等。
其中,在车载摄像头部分应用将大幅提升,其主要工作原理是将采集好的图像转换成二维数据,让感知层对于采集后的图像进行场景及驾驶模式识别,通过图像匹配算法是别行驶过程中的行人,车辆,交通标示等等,最后依据目标物体的运动模式使用定位技术,来估算物体与车体的相对距离及相对速度,更是自动驾驶实现安全级别最重要的环节,一般预料,要实现L4以上级别自动驾驶,车载摄像头单车搭载要20颗左右,将是非常大规模的商机。
