.png)

2021-08-16 Sony測距感測器- dToF
Sony開發全新的直接飛行時間(Direct Time-of-Flight,dToF)測距感測器,採用單光子雪崩二極體(single-photon avalanche diode,SPAD)可在更短時間內擷取影像3D景深數據,或是在低光環境擷取更多影像資訊。dTOF影像感測技術的發展將有助開發汽車高級駕駛輔助系統(ADAS)、自動駕駛(AD)、機器人、安控,手勢識別和互動遊戲產業相關的應用。
SPAD是利用雪崩倍增技術將分段入射光子的電子放大,從而形成雪崩式疊加的相對結構,即使是微弱的光線也能檢測。通過採用SPAD作為dToF感測器中的接收探測器,可以實現遠距離,精密的距離測量,該感測器根據來自光源發出的光被物體反射後返回到感測器的飛行時間(時間差)來測量與物體的距離。
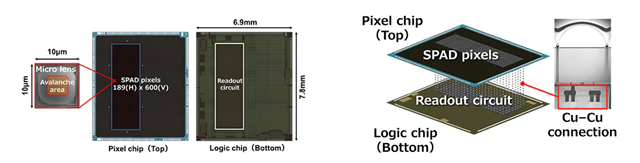
Sony dToF 測距感測器結構
Sony新技術採用了背照式SPAD畫素結構,上層為畫素晶片利用銅-銅連接下層晶片為測距處理器電路的邏輯晶片。這樣設計可以將除畫素以外的所有電路都放在底部,從而實現高感光率和22%的高光子檢測效率,即使是小型的晶片,能在10μm的畫素尺寸下實現約11萬有效畫素(189×600畫素)的高解析度。這就可以實現以15公分為單位間隔進行高精度測量,測距最遠可達300米,從而有助於提高檢測和識別性能。
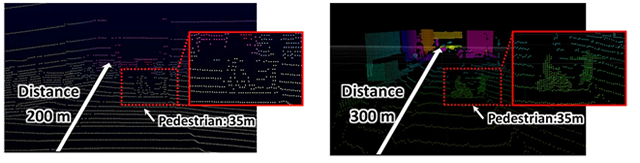
Point Cloud(點雲) (左:傳統雷射雷達,右:新開發的雷射雷達)
利用SPAD感測器快速獲取精確的三維空間訊息,可以實現更精確的位置。人們對SPAD感測器的應用寄予厚望,希望它能解決無人駕駛車輛設計中的一個最大挑戰:測量車輛與其附近的人和物體之間的距離。
Sony dToF規格:
資料參考來源: https://www.Sony.com/en/SonyInfo/News/Press/202102/21-016E/
Sony dToF 測距感測器結構
Sony新技術採用了背照式SPAD畫素結構,上層為畫素晶片利用銅-銅連接下層晶片為測距處理器電路的邏輯晶片。這樣設計可以將除畫素以外的所有電路都放在底部,從而實現高感光率和22%的高光子檢測效率,即使是小型的晶片,能在10μm的畫素尺寸下實現約11萬有效畫素(189×600畫素)的高解析度。這就可以實現以15公分為單位間隔進行高精度測量,測距最遠可達300米,從而有助於提高檢測和識別性能。
Point Cloud(點雲) (左:傳統雷射雷達,右:新開發的雷射雷達)
利用SPAD感測器快速獲取精確的三維空間訊息,可以實現更精確的位置。人們對SPAD感測器的應用寄予厚望,希望它能解決無人駕駛車輛設計中的一個最大挑戰:測量車輛與其附近的人和物體之間的距離。
Sony dToF規格:
|
Total number of SPAD pixels |
189 x 600 pixels (H x V), approx. 110,000 pixels |
|
Image size |
Diagonal 6.25 mm (1/2.9-type) |
|
Recommended light source wavelength |
905 nm |
|
SPAD unit cell size |
10 µm x 10 µm |
|
Element size (ToF pixel unit) |
3 x 3 pixels (H x V) |
|
Power consumption |
1,192 mW |
|
Photon detection efficiency |
22% |
|
Response speed |
6 ns |
|
Saturation signal amount |
60,000,000 cps |
|
Max. detection distance |
300 m |
|
Distance precision at 300 m |
3 x 3 pixels (H x V) additive mode: 30 cm |
